67-0372-03 [受注停止]ロボットベース RoverC Pro M5STACK-K036-B
[M5Stack]
特徴
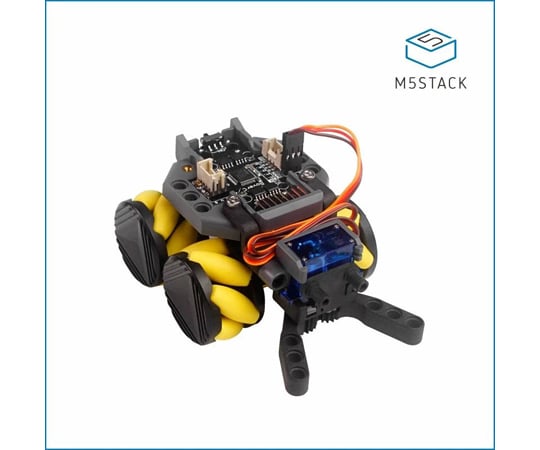
- M5StickCを接続して使用する全方向移動ロボットベース
- RoverC ProはRoverCのアップグレード製品で、メカナムホイールを使用しあらゆる方向に移動させることができます。
- メカナムホイールは、スウェーデンのMecanum社が発明した任意の方向に移動できるように設計されたホイールで、ローラーが車輪に45度の角度で取り付けられています。
- ベースの主制御チップはSTM32F030C6T6です。
- 4個のN20ウォームギアモーターをM5StickCからI2C通信で制御できます。
- メカナムホイールが取り付けられていて、前後左右自由に移動できます。
- RoverC Proでは、サーボで制御するグリッピング機構が新たに追加され、ものを持ち上げることができます。
- ベースには専用のサーボ制御ドライバーを2つ搭載しています。また、Grove対応のI2Cコネクタを2つ備えているので、他のモジュールの拡張も容易です。
- ベースはレゴと互換性があり、ブロックなどを取り付けて拡張することができます。
- 背面には16340(700mAh)のバッテリーが取り付けられています。従来品と異なり、バッテリーの交換が可能になっています。
- バッテリーは、M5StickCまたはM5StickC PlusにUSBケーブルを使って給電することで充電することができます。
- ベースの電源は独立したスイッチで制御できます。
- 【ご注意】
- ※ご利用いただくには、別途M5StickCまたはM5StickC Plusが必要です。
- ※本製品にはM5StickCまたはM5StickC Plusは含まれていませんので、ご注意ください。
仕様
- I2Cアドレス:0×38
- インターフェース:Groveポート ×2
- バッテリー:16340バッテリー(700mAh)
- 本体寸法:120×75×58mm
- 本体重量:187g
- 【セット内容】
- RoverCベース(16340バッテリー含む)×1
- グリップパーツ ×1
- 【資料】
- 製造元ドキュメントページ
- Arduinoサンプルコード
- JoyCと組み合わせ時(サーボグリッパー未使用)
- 単独使用時(サーボグリッパー使用)
- UIFlowでのプログラム例